変位計およびディスプレーサーレベル計
変位計およびディスプレーサーレベル計
不快感 レベル機器の活用 アルキメデスの原理 物体の重量を連続的に測定して液面を検出する( 不快感)をプロセス液に浸漬します。液位が上昇すると、ディスプレーサーにかかる浮力が大きくなり、センシング機器では軽くなったと認識されます。センシング機器は、この重量減少を液位の上昇と解釈し、比例出力信号を送信します。
不快感 レベル計
実際には、ディスプレーサー式レベル計は通常、以下の形状をしています。図では、簡略化のため、容器へのプロセス配管は省略し、容器とディスプレーサー式レベル計のみを示しています。
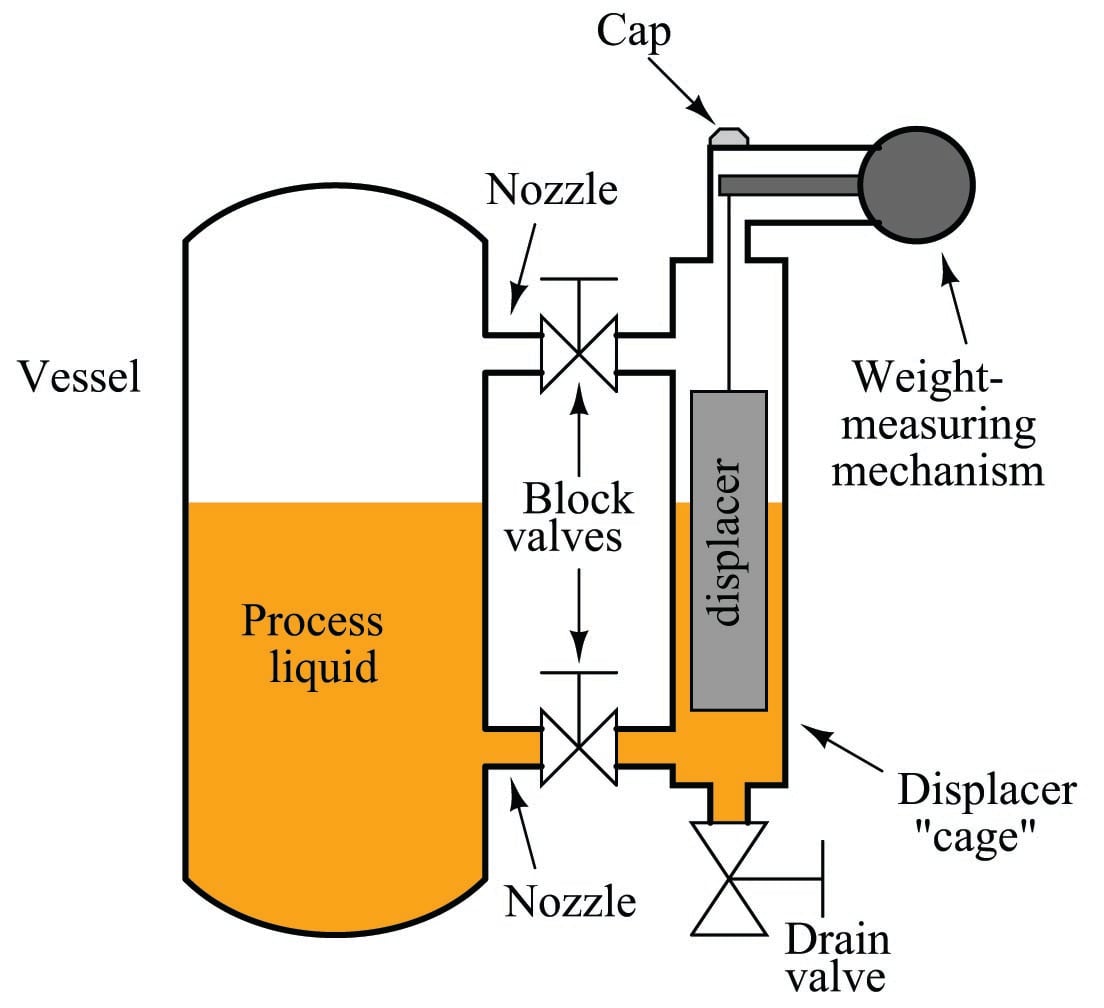
不快感 レベル計ケージ自体は通常、密閉された金属管で、プロセス液に浮かばないように十分な重量が付けられています。ケージは「ケージ」と呼ばれるパイプ内に吊り下げられており、2つのブロックバルブとノズルを介してプロセス容器に接続されています。この2つのパイプ接続により、ケージ内の液面がプロセス容器内の液面と一致するように保たれます。これはまるで覗き窓のようなものです。
プロセス容器内の液面が上昇すると、ケージ内の液面もそれに合わせて上昇します。これにより、ディスプレーサーの容積の大部分が水に浸かり、ディスプレーサーに上向きの浮力が働きます。ディスプレーサーは浮くには重すぎるため、液面上で「上下に揺れる」ことも、液面と同じ量だけ上昇することもありません。むしろ、ケージ内の所定の位置にぶら下がったまま、浮力が増加するにつれて「軽く」なります。重量検知機構は、ディスプレーサーが軽くなったことを感知するとこの浮力を検知し、減少した(見かけの)重量を液面の上昇と解釈します。ディスプレーサーの見かけの重量は、プロセス液がケージ内の 100% のポイントに達し、完全に水に浸かったときに最小になります。
容器内の静圧はディスプレーサー計器の精度にほとんど影響を与えないことに留意すべきである。唯一重要な要因はプロセス流体の密度である。なぜなら、浮力は流体の密度に正比例するからである(
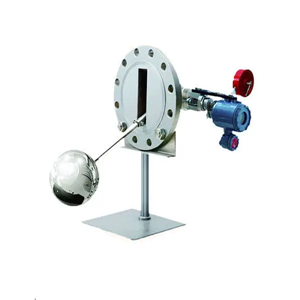
次の写真は、フィッシャー社の「レベル・トロール」型空気圧トランスミッターが凝縮液レベルを測定している様子を示しています。 ノックアウトドラム 天然ガス供給用の計器です。計器本体は写真の右側に写っており、その上に灰色の「ヘッド」があり、2つの空気圧計が見えます。ディスプレーサー「ケージ」は、ヘッドユニットのすぐ後ろと下にある垂直のパイプです。ノックアウトチャンバー(または 凝縮ブート)プロセス容器内の凝縮水レベルを視覚的に表示します。

このディスプレーサー計器の目的は、「ブーツ」内に溜まった凝縮液の量を測定することです。このFisher レベル-Trolモデルには、空気圧制御機構が組み込まれており、排水バルブに空気圧信号を送り、ブーツ内の凝縮液を自動的に排出します。
ここには、レベル-トロル ディスプレイスメント計器を分解した 2 枚の写真があり、ディスプレイスメントがケージ パイプ内にどのように収まるかを示しています。


ケージパイプは2つのブロックバルブを介してプロセス容器に接続されており、プロセスから分離することができます。ドレンバルブにより、ケージ内のプロセス液を排出し、機器のメンテナンスやゼロ点校正を行うことができます。
一部のディスプレーサ型レベルセンサはケージを使用せず、ディスプレーサエレメントをプロセス容器内に直接吊り下げます。これらは「ケージレス」センサと呼ばれます。ケージレス型センサはケージ型センサよりもシンプルですが、設置されているプロセス容器の圧力を減圧(場合によっては空にすること)しなければメンテナンスできません。また、容器内外の流速が高い場合や、プロセス液体を完全に混合するために容器内に設置されたモーター回転式インペラの作用によって容器内の液体が撹拌されると、測定誤差や「ノイズ」が発生しやすくなります。
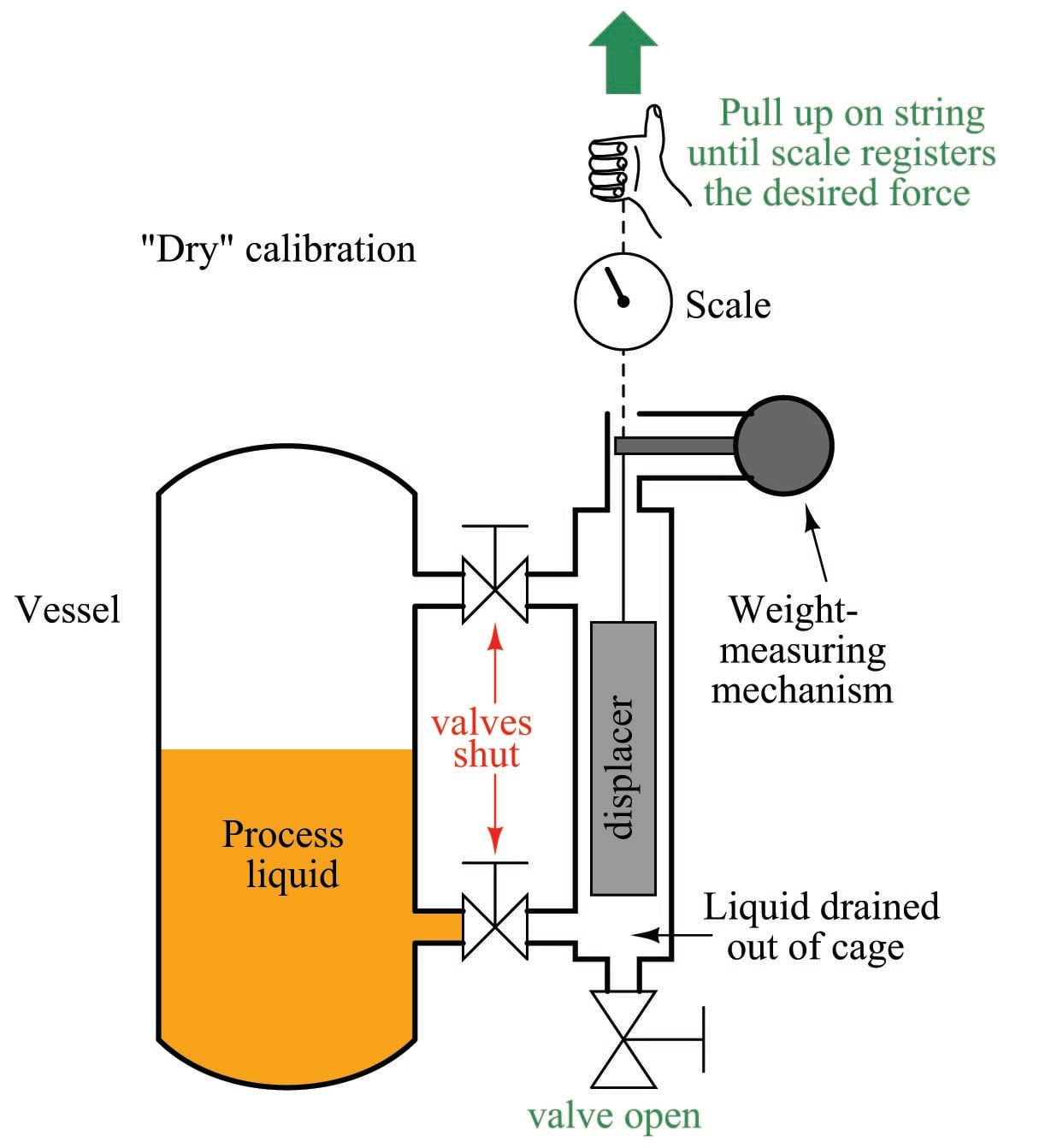
フルレンジ校正は、ケージにプロセス液を流すことで実行できます( 濡れた 校正)、または、変位計を紐と精密スケールで吊り下げる( ドライ (校正)ディスプレーサーを適切な量だけ引き上げて、100% の液面における浮力をシミュレートします。
この浮力の計算は簡単です。アルキメデスの原理によれば、浮力は常に押しのけられた流体の体積の重さに等しいとされています。ディスプレーサ式液面計をフルレンジで使用する場合、これは通常、ディスプレーサ要素の容積全体が液体に浸かっていることを意味します。ディスプレーサの容積(円筒形の場合)を計算するだけです。
たとえば、プロセス流体の重量密度が 1 立方フィートあたり 57.3 ポンドで、ディスプレーサーが直径 3 インチ、長さ 24 インチの円筒形である場合、最大レベルでの浮力状態をシミュレートするために必要な力は次のように計算できます。
単位の一貫性を保つことがいかに重要かに注意してください。液体の密度は立方ポンド当たりの単位で与えられています。 足 およびディスプレイサーの寸法 インチフィートとインチの変換がなければ、深刻な問題が発生していたでしょう。私の例では、密度を立方インチあたりの重量ポンド単位に変換しましたが、ディスプレーサーの寸法をフィートに変換して、立方フィート単位のディスプレーサー容積を求めることも同様に簡単にできました。
「ウェット」校正では、5.63ポンドの浮力は液体自体によって発生し、技術者はケージ内に100%レベル状態をシミュレートするのに十分な液体があることを確認します。「ドライ」校正では、手持ちのスケールと紐を使ってディスプレーサーに上向きの張力をかけることで浮力をシミュレートします。技術者は5.63ポンドの上向きの力で引っ張り、機器が100%の液体レベルを検知していると「思い込ませる」ようにします。実際にはディスプレーサーは完全に乾燥しており、空中に吊り下げられています。
トルクチューブ 不快感 レベル計
変位型レベルトランスミッタの興味深い設計上の課題は、ディスプレーサの感知重量をトランスミッタ機構に伝達しつつ、同時にプロセス蒸気圧をトランスミッタ機構から確実に遮断する方法です。この問題に対する最も一般的な解決策は、「 トルクチューブ残念ながら、トルク チューブは、実際に使用してみないと理解するのが難しいため、このセクションでは、リファレンス マニュアルで通常提供されるよりも詳細にこの概念について説明します。
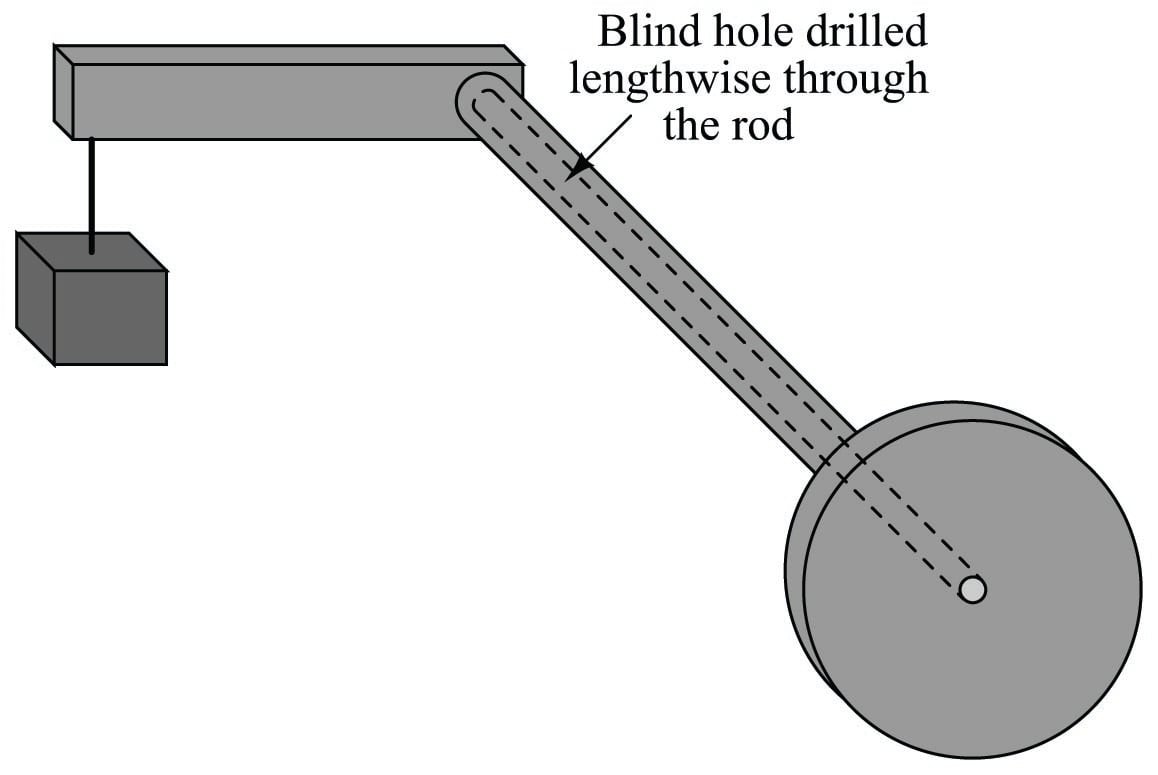
片端にフランジ、もう片端に垂直なレバーが付いた、水平方向の金属棒を想像してください。フランジは固定面に取り付けられ、レバーの端から重りが吊り下げられています。破線の円は、棒がフランジの中心に溶接されている位置を示しています。
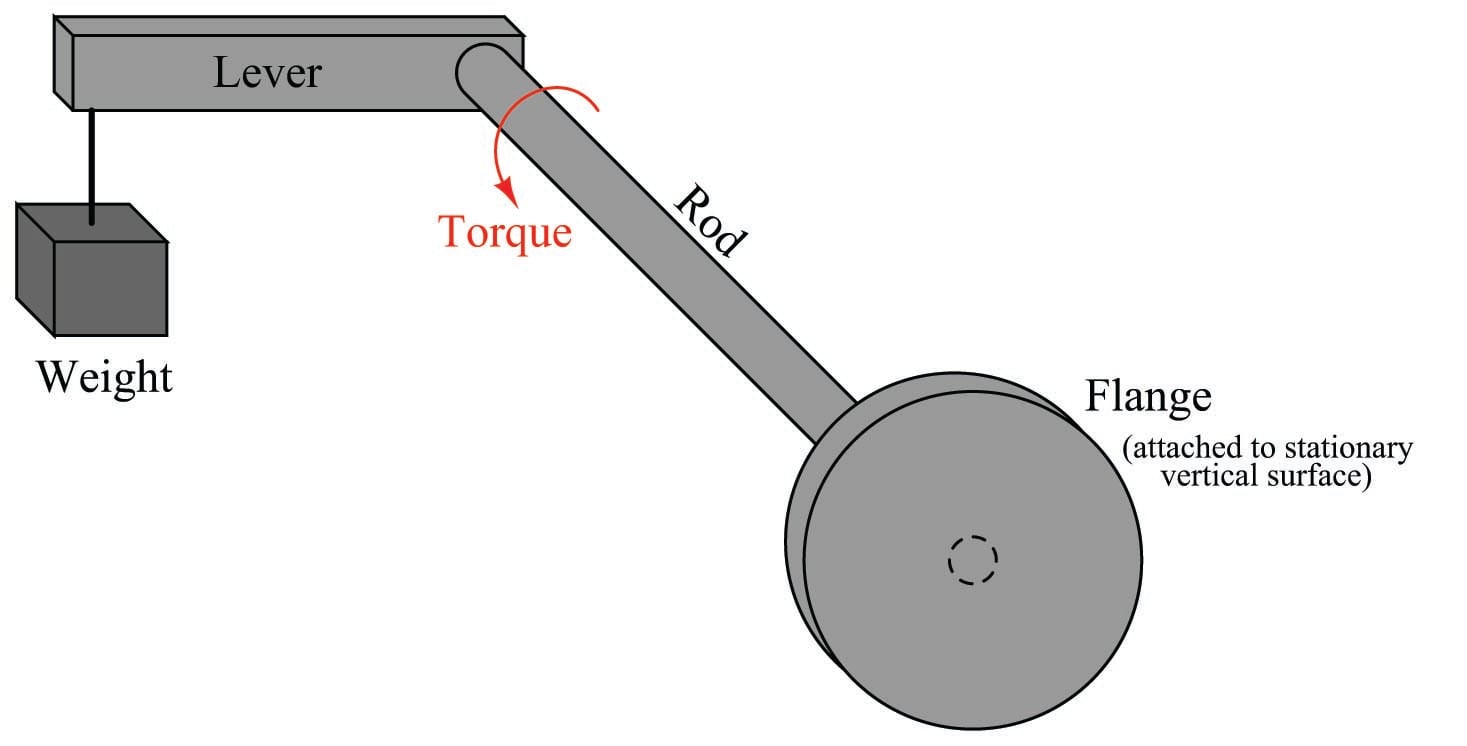
レバーに作用する重りの下向きの力は、棒にねじり力(トルク)を与え、棒の長さに沿ってわずかにねじれます。レバーの端に掛ける重りが大きければ大きいほど、棒のねじれも大きくなります。重りとレバーによって加えられるトルクが棒の弾性限界を超えない限り、棒はバネとして作用し続けます。棒の「バネ定数」が分かっており、そのねじりたわみを測定すれば、このわずかな動きを利用して、レバーの端に掛けられた重りの大きさを測定することができます。
ディスプレーサ型液面計にディスプレーサを組み込むと、レバー先端の錘の代わりにディスプレーサが使用され、このロッドのねじれが浮力を表します。液体が上昇すると、ディスプレーサにかかる浮力が大きくなり、ロッドから見たディスプレーサが軽くなったように見えます。この見かけ上の重量変化によって生じるロッドのわずかな動きが液面を示します。
では、ロッドにレバーが取り付けられている端まで届くほどの長い穴を縦に開けることを想像してください。言い換えれば、 盲穴 ロッドの中心をフランジから始めてレバーのすぐ手前で終えます。
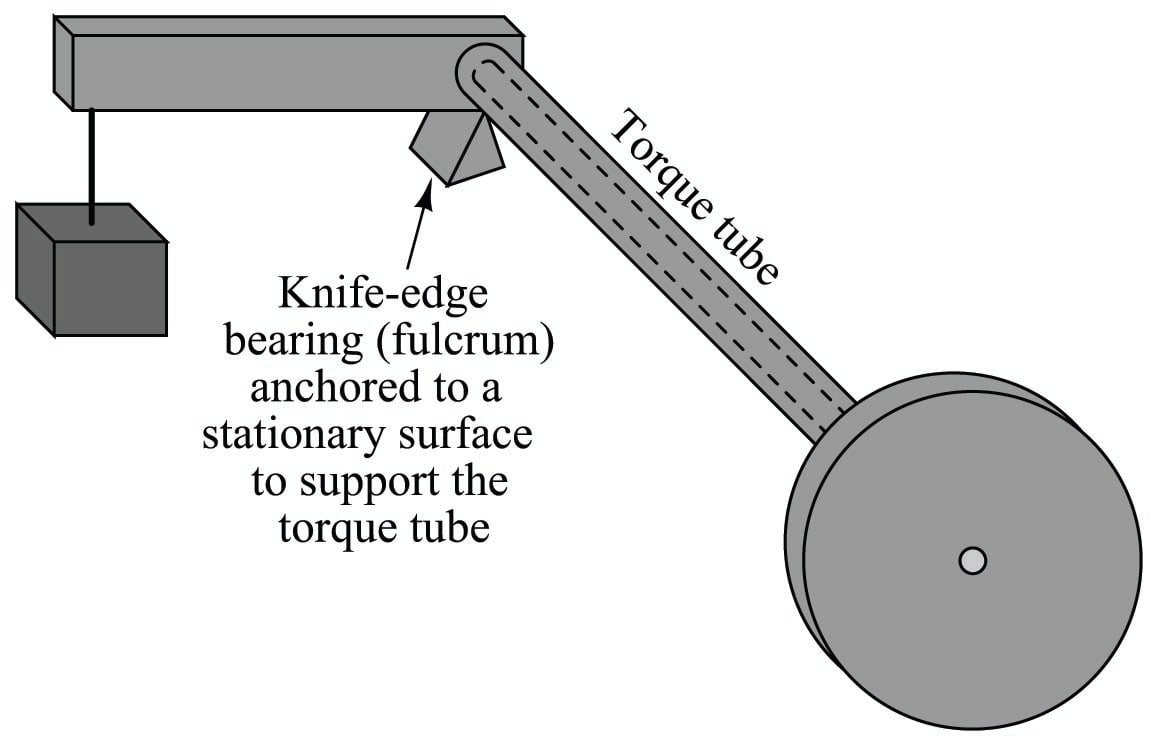
この長い穴の存在は、ロッドのバネ定数を変える程度で、アセンブリの挙動に大きな変化をもたらすことはありません。金属の固さが減ると、ロッドはバネとしての機能が低下し、レバーの先端に荷重が加わると、より大きなねじれが生じます。しかし、この議論においてより重要なのは、この長い穴によってロッドが チューブ 密閉端を持つ。「トーションバー」ではなく、ロッドはより正確には「トーションバー」と呼ばれる。 トルクチューブレバーの端に重みをかけると、わずかに回転します。
トルクチューブに垂直な支持を与え、荷重がかかったときに下方に垂れ下がらないようにするために、支持 ナイフエッジベアリング 多くの場合、レバーの端部の下、トルクチューブに取り付けられる部分に支点が配置されます。この支点の目的は、重量を垂直に支えながら、実質的に摩擦のないピボットポイントを形成することです。これにより、トルクチューブにかかる応力は、 トルク レバーから:
最後に、別の固体金属棒(穴よりわずかに小さい直径)が止まり穴の遠端にスポット溶接され、フランジの端を超えて伸びていると想像してください。
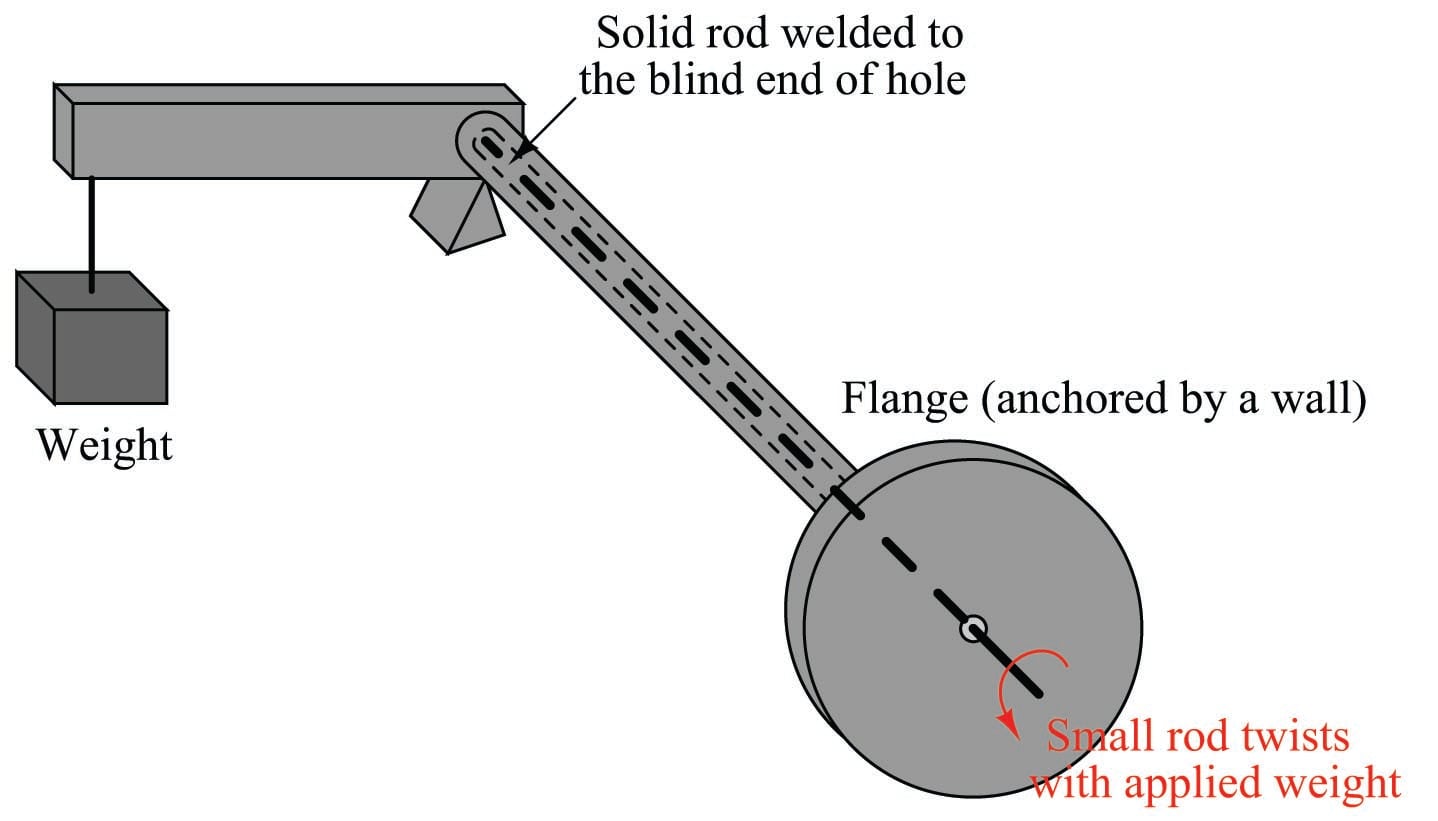
この小径ロッドの目的は、トルクチューブの遠端のねじれ運動をフランジを越えた位置まで伝達し、そこで感知できるようにすることです。フランジが垂直の壁に固定され、可変の重りがレバーの端を下方に引っ張っているところを想像してみてください。トルクチューブは可変の力によってねじれ運動しますが、壁の手前側にある小さなロッドの回転を観察することで、どれだけねじれるかを正確に把握できます。重りとレバーは壁によって完全に隠れているかもしれませんが、それでも小さなロッドのねじれ運動は、トルクチューブが重りの力にどれだけ屈服するかを明らかにします。
このトルクチューブ機構を加圧容器内の液面測定に応用するには、重りをディスプレーサーに置き換え、フランジを容器に溶接されたノズルに取り付け、小型ロッドの先端にモーションセンサーを取り付けて回転を測定します。液面が上昇または下降すると、ディスプレーサーの見かけ上の重量が変化し、トルクチューブがわずかにねじれます。このわずかなねじれ運動は、プロセス流体の圧力から隔離された環境において、小型ロッドの先端で検出されます。
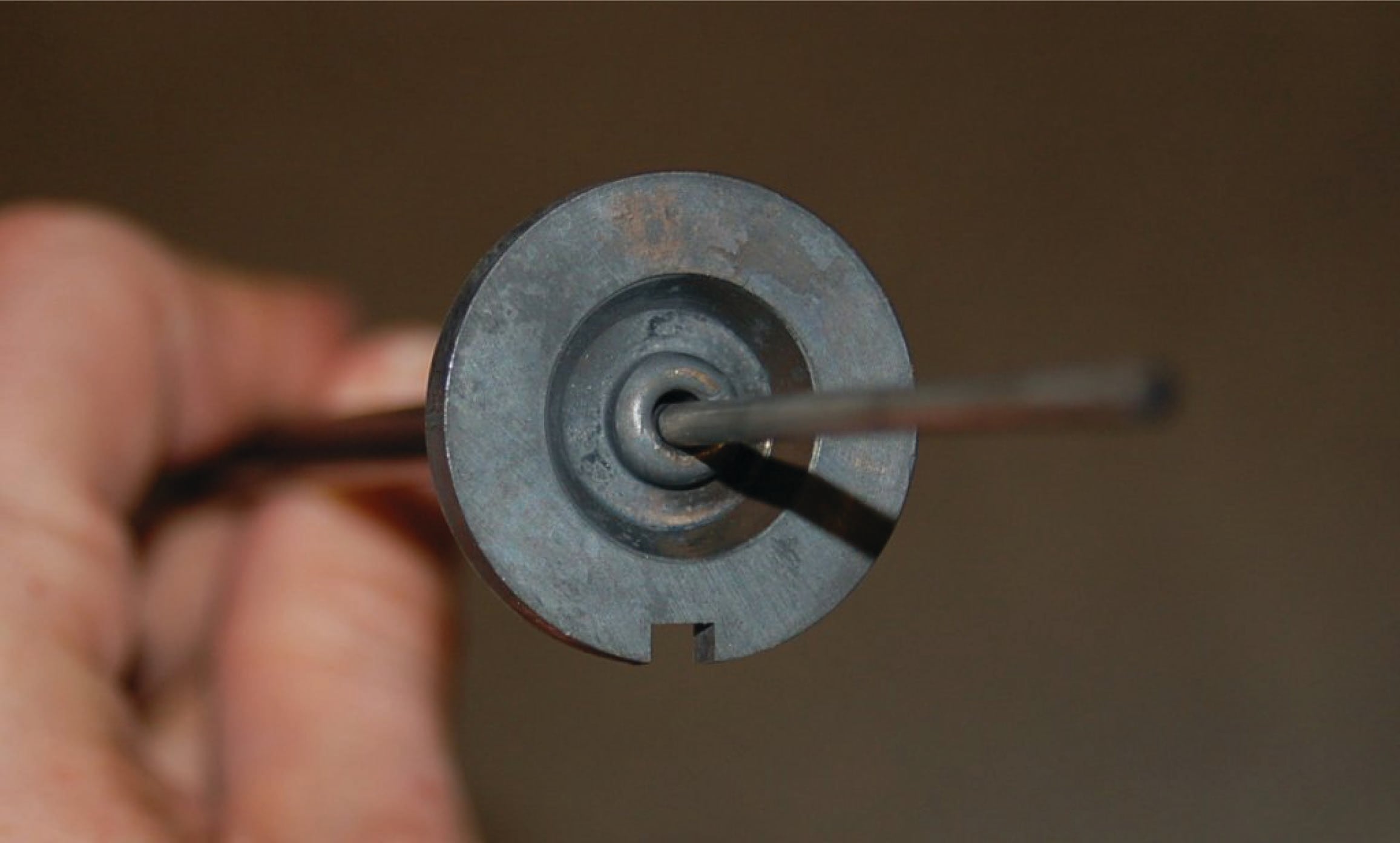
フィッシャーの「レベル-トロル」レベルトランスミッターの実際のトルクチューブを撮影した写真には、その外観が示されています。

暗い色の金属は、ねじりバネとして重りを吊り下げる弾性鋼で、光沢のある部分は動きを伝達する内部ロッドです。ご覧の通り、トルクチューブ自体の直径はそれほど大きくありません。もし大きければ、ディスプレーサ型水準器に実用するにはバネが硬すぎます。なぜなら、ディスプレーサは通常それほど重くなく、レバーもそれほど長くないからです。
トルク チューブの両端をよく見ると、小径ロッドが突き出ている開口端 (左) と、レバーに取り付けられているチューブの「盲端」 (右) がわかります。

トルク チューブ アセンブリを縦に半分に切ると、断面は次のようになります。

次の図は、変位型レベルトランスミッター全体の一部としてのトルク チューブを示しています。
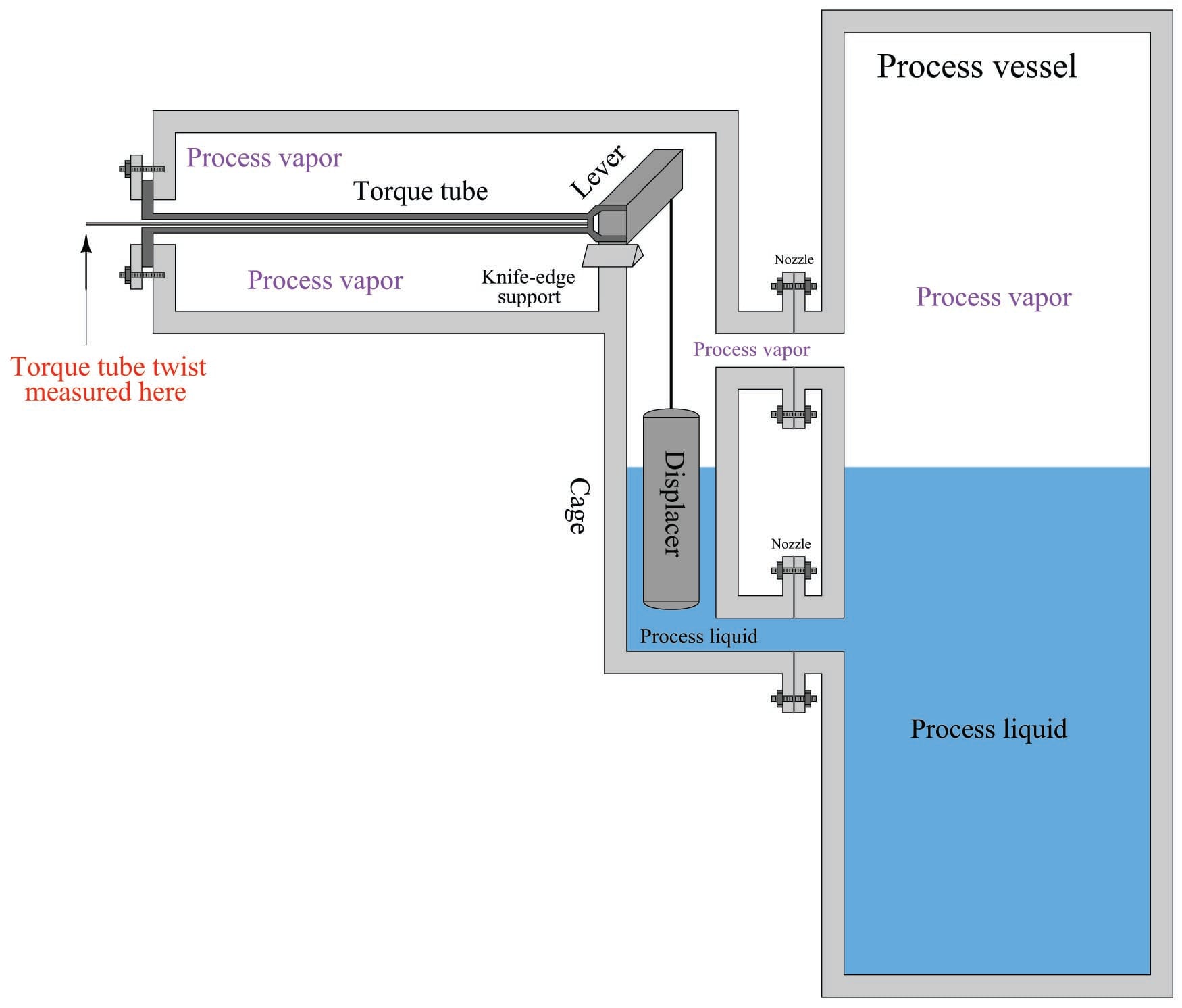
この図からわかるように、トルク チューブは、ディスプレーサ型レベル測定アプリケーションに適用された場合、(1) ディスプレーサの重量を吊り下げるねじりバネとして機能すること、(2) 位置検知機構からプロセス流体の圧力を遮断すること、(3) トルク チューブの遠端からの動きを検知機構に伝達すること、という 3 つの異なる目的を果たします。
空気圧式レベルトランスミッターでは、トルクチューブのねじれ運動を空気圧(空気圧)信号に変換するために使用される感知機構は、通常、 モーションバランス 設計。例えば、フィッシャー・レベル・トロール機構は、先端にノズルを備えたC字型のブルドン管を用いて、小ロッドに取り付けられたバッフルに追従します。ブルドン管の中心はトルクチューブの中心と一致しています。ロッドが回転すると、バッフルがブルドン管先端のノズルに向かって前進し、背圧が上昇してブルドン管が曲がります。この曲がりによって、ノズルは前進するバッフルから引き離され、最終的にバランス状態になります。このように、ロッドの動きはブルドン管の動きによってバランスが保たれ、これはモーションバランス型空気圧システムとなります。

変位界面レベル測定
ディスプレーサ式液面計は、静水圧計と同様に液液界面の測定に使用できます。重要な要件の一つは、ディスプレーサが常に完全に水没している(「浸水」している)ことです。この規則に違反すると、計器は低い(総)液位と低い界面レベルを区別できなくなります。この基準は、液液界面レベルを測定するための補正脚型差圧計の使用に類似しています。計器が界面レベルの変化のみに反応し、総液位の変化に「誤作動」しないようにするには、両方のプロセス接続点が水没している必要があります。
ディスプレーサ式液面計に専用の「ケージ」が付いている場合は、ケージとプロセス容器(「ノズル」と呼ばれることもあります)を接続する両方のパイプを水没させることが重要です。これにより、ケージ内の液体界面が容器内の界面と一致するようになります。上部ノズルが乾燥すると、ケージ付きディスプレーサ式液面計でも「サイトグラス」式液面計と同じ問題が発生する可能性があります(セクションを参照)。 [インターフェーストラブル] この問題の詳細な説明については、ページから始まっています。
2種類の液体の組み合わせによる変位素子にかかる浮力を計算することは、思ったほど難しくありません。アルキメデスの原理は依然として成り立ちます。つまり、浮力は押しのけられた液体の重量に等しいということです。浮力を計算するには、押しのけられた液体の重量と体積の合計を計算するだけで済みます。単一の液体の場合、浮力はその液体の重量密度に等しくなります(
2 液界面の場合、浮力は 2 つの液体の押しのけられた重量の合計に等しく、各液体の重量項はその液体の重量密度にその液体の押しのけられた体積を乗じたものに等しくなります。
全長にわたって断面積が一定である変位器を仮定すると、各液体の変位量は単に同じ面積(
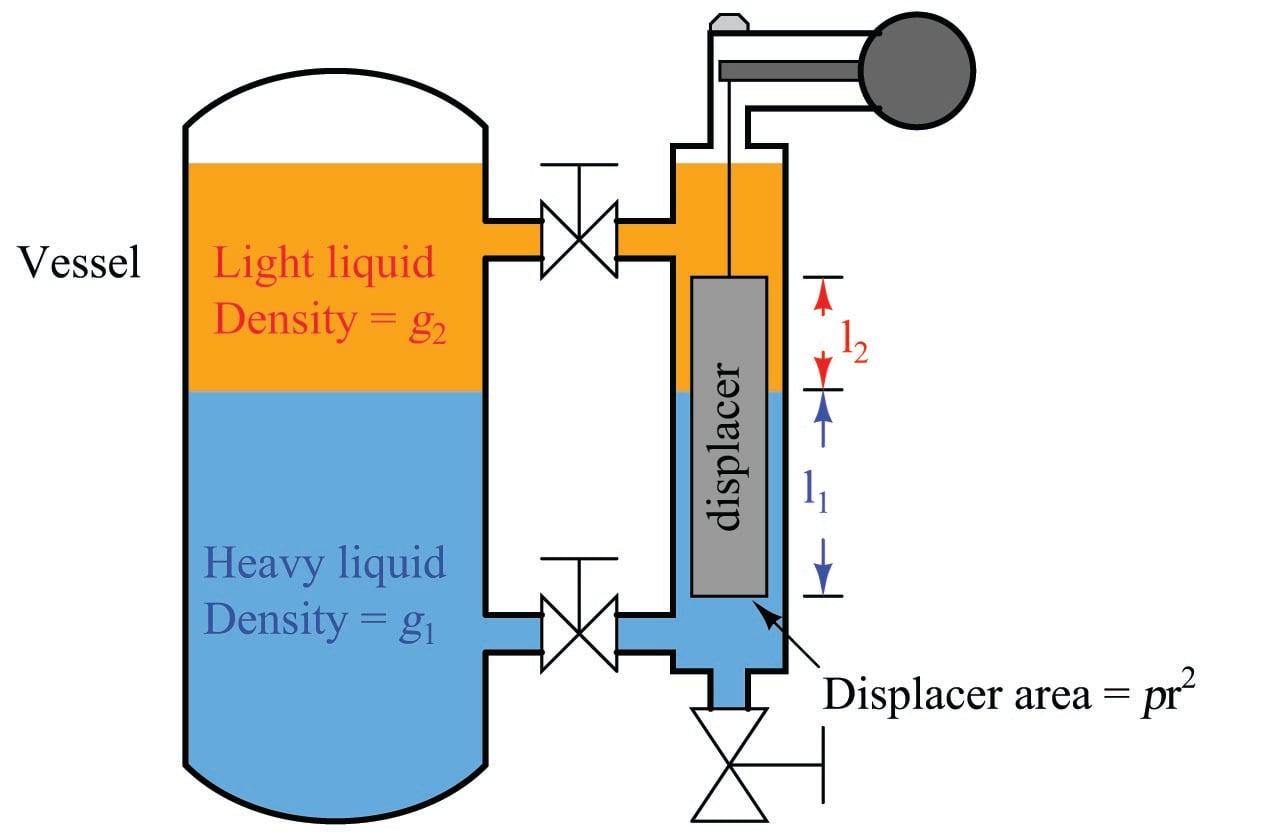
この地域(
ディスプレーサ型レベル計をインターフェース用途で使用する場合、校正点の決定は比較的容易です。静水圧インターフェースレベル測定の場合と同様に、LRV(下限値)とURV(上限値)の条件を「思考実験」として検討すれば、容易に行うことができます。まず、インターフェースが下限値にあるときのディスプレーサの状態を「どのように見えるか」を想像し、次にインターフェースが上限値にあるときの異なるシナリオを想像します。分かりやすくするために、各シナリオを図示することをお勧めします。
比重が0.850と1.10の2つの液体の界面レベルを測定するディスプレーサー計器があるとします。ディスプレーサーの長さは30インチ、ディスプレーサーの直径は2.75インチ(半径1.375インチ)です。この場合、LRVは界面がディスプレーサーの底部にある位置、URVは界面がディスプレーサーの上部にある位置とします。LRVとURVの界面レベルをディスプレーサーの長さの両端に配置することで、LRVとURVの計算が簡素化されます。LRVの「思考実験」は、単にディスプレーサーが軽い液体に完全に浸かっている状態、URVの「思考実験」は、単にディスプレーサーが重い液体に完全に浸かっている状態となるからです。
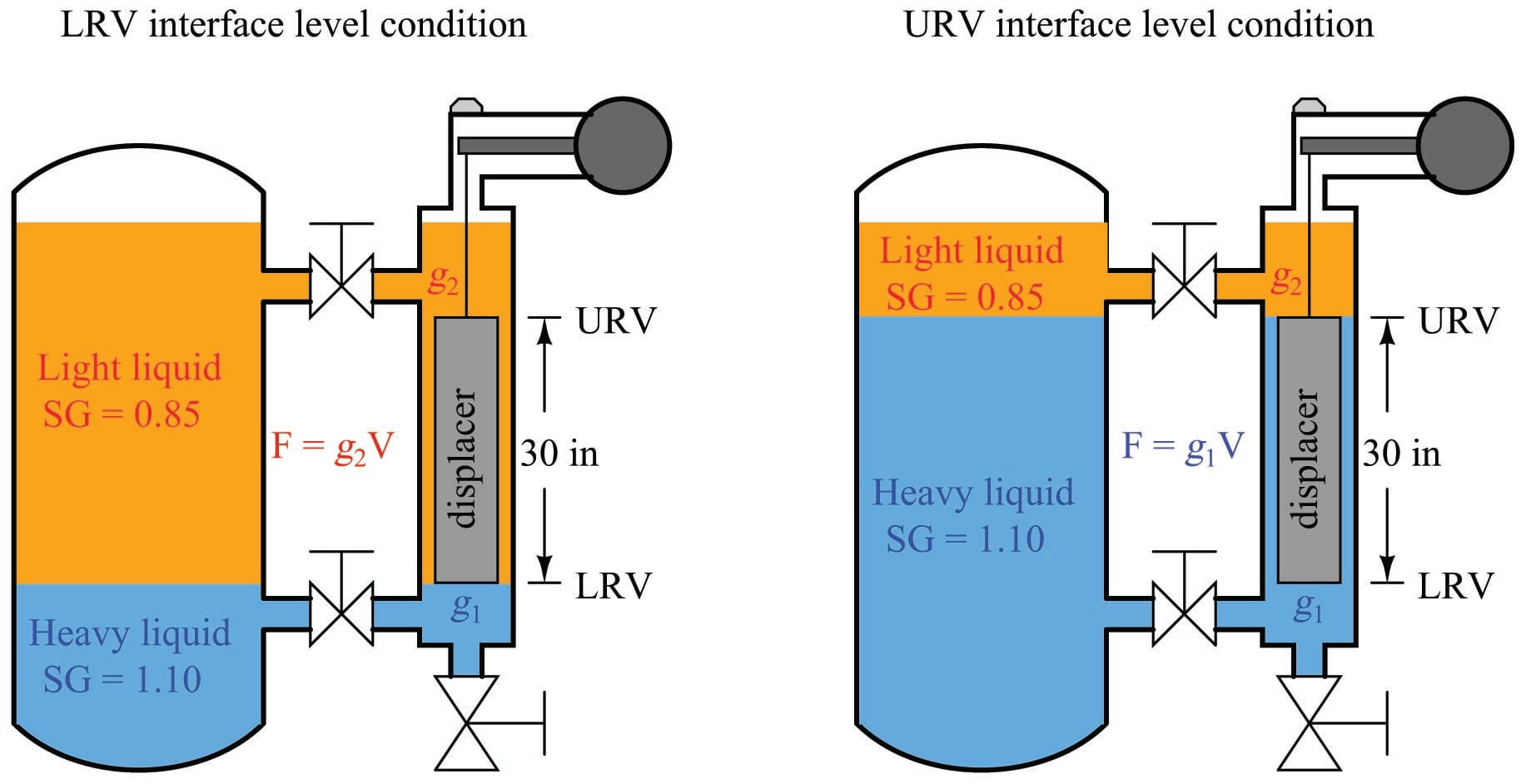
LRV浮力の計算:
URV浮力の計算:
この仮想例の実際の計算を示します。
LRV(0%)とURV(100%)間の任意の測定パーセンテージの浮力は、補間によって計算できます。
| インターフェースレベル(インチ) | 浮力(ポンド) |
|---|---|
| 0 | 5.47 |
| 7.5 | 5.87 |
| 15 | 6.27 |
| 22.5 | 6.68 |
| 30 | 7.08 |